Danovaro, R., Corinaldesi, C., Dell’Anno, A. & Snelgrove, P. V. R. The deep-sea under global change. Curr. Biol. 27, R461–R465 (2017).
Clarke, T. Robots in the deep. Nature 421, 468–470 (2003).
Yoerger, D. R., Jakuba, M., Bradley, A. M. & Bingham, B. Techniques for deep sea near bottom survey using an autonomous underwater vehicle. Int. J. Robot. Res. 26, 41–54 (2007).
Petersen, S. et al. News from the seabed—geological characteristics and resource potential of deep-sea mineral resources. Mar. Policy 70, 175–187 (2016).
Stachiw, J. D., Peters, D. & McDonald, G. Ceramic external pressure housings for deep sea vehicles. In IEEE Oceans Conf. https://doi.org/10.1109/OCEANS.2006.306971 (IEEE, 2006).
Błachut, J. & Smith, P. Buckling of multi-segment underwater pressure hull. Ocean Eng. 35, 247–260 (2008).
Kampmann, P., Lemburg, J., Hanff, H. & Kirchner, F. Hybrid pressure-tolerant electronics. In IEEE Oceans Conf. https://doi.org/10.1109/OCEANS.2012.6404828 (IEEE, 2012).
McPhail, S. D. Autosub6000: a deep diving long range AUV. J. Bionics Eng. 6, 55–62 (2009).
Umapathy, A. et al. Influence of deep-sea ambient conditions in the performance of pressure-compensated induction motors. Mar. Technol. Soc. J. 53, 67–73 (2019).
Bingham, N. Designing pressure-tolerant electronic systems. Unmanned Underwater Technology https://www.uutech.com/ptepaper/ (2013).
Kunzig, R. Perceptions of science. Deep-sea biology: living with the endless frontier. Science 302, 991 (2003).
Danovaro, R. et al. Deep-sea biodiversity in the Mediterranean Sea: the known, the unknown, and the unknowable. PLoS ONE 5, e11832 (2010).
Linley, T. D. et al. Fishes of the hadal zone including new species, in situ observations and depth records of Liparidae. Deep Sea Res. Part I 114, 99–110 (2016).
Yancey, P. H., Gerringer, M. E., Drazen, J. C., Rowden, A. A. & Jamieson, A. Marine fish may be biochemically constrained from inhabiting the deepest ocean depths. Proc. Natl Acad. Sci. USA 111, 4461–4465 (2014).
Wang, K. et al. Morphology and genome of a snailfish from the Mariana Trench provide insights into deep-sea adaptation. Nat. Ecol. Evol. 3, 823–833 (2019).
Hoving, H. J. T. & Haddock, S. H. D. The giant deep-sea octopus Haliphron atlanticus forages on gelatinous fauna. Sci. Rep. 7, 44952 (2017).
Kawabata, T. et al. Evaluation of the bioactivities of water-soluble extracts from twelve deep-sea jellyfish species. Fish. Sci. 79, 487–494 (2013).
Picardi, G. et al. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robot. 5, eaaz1012 (2020).
Stuart, H. S., Wang, S., Khatib, O. & Cutkosky, M. R. The Ocean One hands: an adaptive design for robust marine manipulation. Int. J. Robot. Res. 36, 150–166 (2017).
Stuart, H. S., Wang, S. & Cutkosky, M. R. Tunable contact conditions and grasp hydrodynamics using gentle fingertip suction. IEEE Trans. Robot. 35, 295–306 (2019).
Renda, F., Giorelli, M., Calisti, M., Cianchetti, M. & Laschi, C. Dynamic model of a multibending soft robot arm driven by cables. IEEE Trans. Robot. 30, 1109–1122 (2014).
Lum, G. Z. et al. Shape-programmable magnetic soft matter. Proc. Natl Acad. Sci. USA 113, E6007–E6015 (2016).
Laschi, C. Soft robot arm inspired by the octopus. Adv. Robot. 26, 709–727 (2012).
Weymouth, G. & Triantafyllou, M. S. Ultra-fast escape of a deformable jet-propelled body. J. Fluid Mech. 721, 367–385 (2013).
Giorgio-Serchi, F., Arienti, A. & Laschi, C. Underwater soft-bodied pulsed-jet thrusters: actuator modeling and performance profiling. Int. J. Robot. Res. 35, 1308–1329 (2016).
Serchi, F. G., Lidtke, A. K. & Weymouth, G. A soft aquatic actuator for unsteady peak power amplification. IEEE–ASME Trans. Mechatron. 23, 2968–2973 (2018).
Vogt, D. M. et al. Shipboard design and fabrication of custom 3D-printed soft robotic manipulators for the investigation of delicate deep-sea organisms. PLoS ONE 13, e0200386 (2018).
Phillips, B. T. et al. A dexterous, glove-based teleoperable low-power soft robotic arm for delicate deep-sea biological exploration. Sci. Rep. 8, 14779 (2018).
Galloway, K. C. et al. Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 3, 23–33 (2016).
Chen, Y. et al. Controlled flight of a microrobot powered by soft artificial muscles. Nature 575, 324–329 (2019).
Li, T. et al. Fast-moving soft electronic fish. Sci. Adv. 3, e1602045 (2017).
Christianson, C., Goldberg, N. N., Deheyn, D. D., Cai, S. & Tolley, M. T. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators. Sci. Robot. 3, eaat1893 (2018).
Ji, X. et al. An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators. Sci. Robot. 4, eaaz6451 (2019).
Acome, E. et al. Hydraulically amplified self-healing electrostatic actuators with muscle-like performance. Science 359, 61–65 (2018).
Chiba, S. et al. Electroactive polymer ‘artificial muscle’ operable in ultra-high hydrostatic pressure environment. IEEE Sens. J. 11, 3–4 (2011).
Yuk, H. et al. Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water. Nat. Commun. 8, 14230 (2017).
Marchese, A. D., Onal, C. D. & Rus, D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators. Soft Robot. 1, 75–87 (2014).
Morin, S. A. et al. Camouflage and display for soft machines. Science 337, 828–832 (2012).
Li, S., Vogt, D. M., Rus, D. & Wood, R. J. Fluid-driven origami-inspired artificial muscles. Proc. Natl Acad. Sci. USA 114, 13132–13137 (2017).
Wehner, M. et al. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 536, 451–455 (2016).
Aubin, C. A. et al. Electrolytic vascular systems for energy-dense robots. Nature 571, 51–57 (2019).
Sandoval, J. A., Jadhav, S., Quan, H., Deheyn, D. D. & Tolley, M. T. Reversible adhesion to rough surfaces both in and out of water, inspired by the clingfish suction disc. Bioinspir. Biomim. 14, 066016 (2019).
Wang, Y. et al. A biorobotic adhesive disc for underwater hitchhiking inspired by the remora suckerfish. Sci. Robot. 2, eaan8072 (2017).
Koh, S. J. et al. Mechanisms of large actuation strain in dielectric elastomers. J. Polym. Sci. B 49, 504–515 (2011).
Zhao, X. & Suo, Z. Method to analyze programmable deformation of dielectric elastomer layers. Appl. Phys. Lett. 93, 251902 (2008).
Ma, Z. et al. Thermoplastic dielectric elastomer of triblock copolymer with high electromechanical performance. Macromol. Rapid Commun. 38, 1700268 (2017).
Passaglia, E. & Martin, G. M. Variation of glass temperature with pressure in polypropylene. J. Res. Natl Bur. Stand. A 68, 273–276 (1964).
Jones Parry, E. & Tabor, D. Effect of hydrostatic pressure on the mechanical properties of polymers: a brief review of published data. J. Mater. Sci. 8, 1510–1516 (1973).
Yang, C., Gao, X. & Luo, Y. End-block-curing ABA triblock copolymer towards dielectric elastomers with both high electro-mechanical performance and excellent mechanical properties. Chem. Eng. J. 382, 123037 (2020).
Joung, T. et al. A study on the pressure vessel design, structural analysis and pressure test of a 6000 m depth-rated unmanned underwater vehicle. Ships Offshore Struct. 3, 205–214 (2008).
Liang, C. et al. A study of diving depth on deep-diving submersible vehicles. Int. J. Press. Vessels Piping 75, 447–457 (1998).
Hernes, M. & Pittini, R. Enabling pressure tolerant power electronic converters for subsea applications. In 13th European Conference on Power Electronics and Applications https://ieeexplore.ieee.org/document/5278719 (IEEE, 2009).
Thiede, C. et al. An overall pressure tolerant underwater vehicle: DNS Pegel. In IEEE Oceans Conf. https://ieeexplore.ieee.org/document/5278313 (IEEE, 2009).
"soft" - Google News
March 03, 2021 at 11:30PM
https://ift.tt/3baiRnK
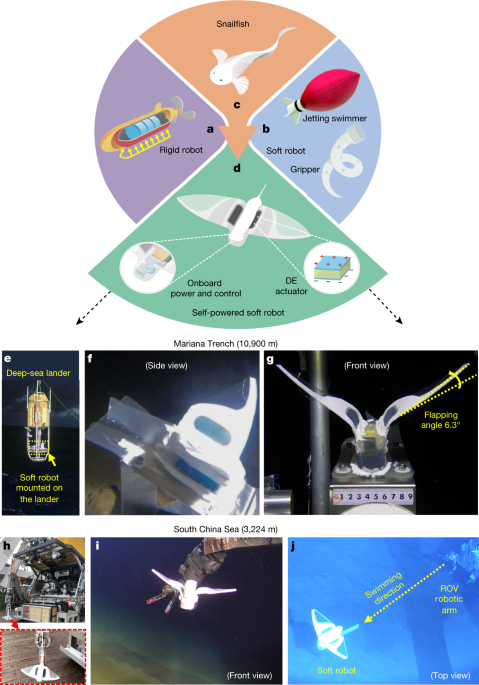
Self-powered soft robot in the Mariana Trench - Nature.com
"soft" - Google News
https://ift.tt/2QZtiPM
https://ift.tt/2KTtFc8
Bagikan Berita Ini














0 Response to "Self-powered soft robot in the Mariana Trench - Nature.com"
Post a Comment