
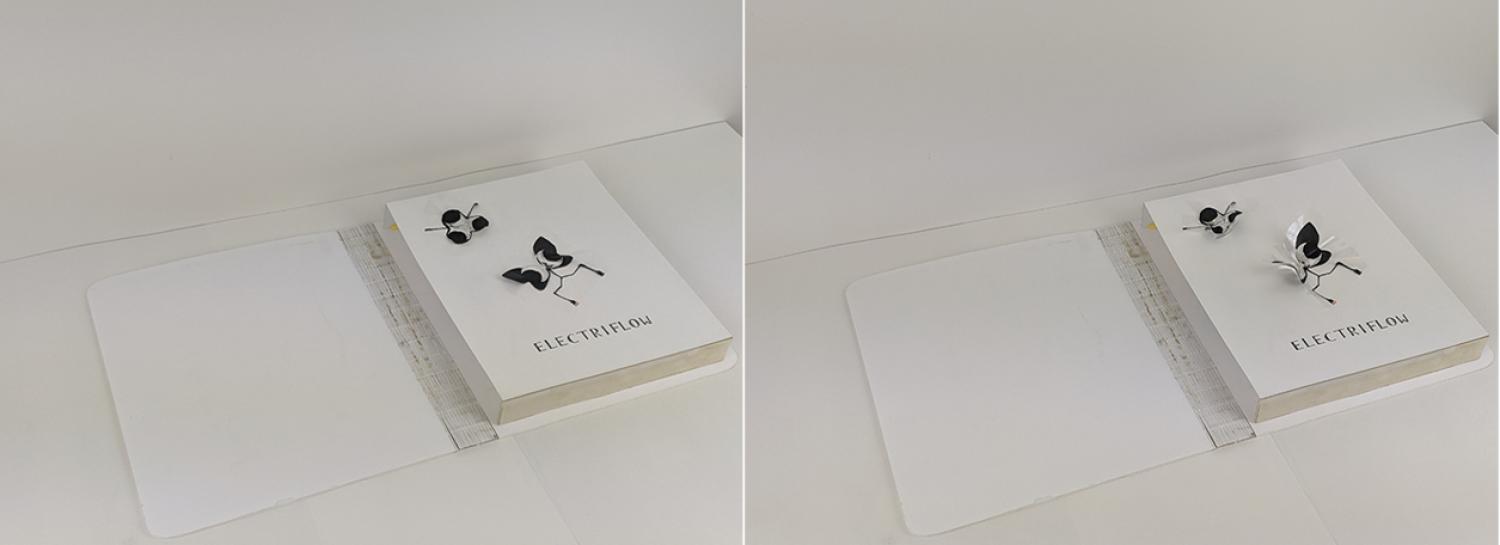
“Usually, books about butterflies are static,” said project leader Purnendu. “But could you have a butterfly flap its wings within a book? We’ve shown that it’s possible.”
In the Colorado Electro-hydraulic device, branded ‘Electriflow’, its actuators comprise two linked parts: a fluid pumping chamber and a second chamber that converts fluid movement into a mechanical angle change. Both chambers are plastic pouches, sealed except for a connection to each other.

The pump consists of two reasonably stiff flat sheets joined at one edge like a slightly open book.
Electrodes are deposited on the outsides of these sheets and, when these are charged to opposing voltages – 10kV is used in the project – electrostatic forces pull the book shut.
The edges of the book-like structure are sealed with flexible membranes, and it is filled with silicone oil that is progressively forced out when voltage is applied.
All of its surfaces of the second chamber are flexible, although some are stretchy and some are not.
By varying which are flexible, various motions can be obtained when oil is forced in.
 The team has settled on three second camber arrangements which create actuators dubbed: hinge-bending (sharp fold shape change), crescent (smooth curved fold) and quarter-moon (sharp fold from an all-soft structure).
The team has settled on three second camber arrangements which create actuators dubbed: hinge-bending (sharp fold shape change), crescent (smooth curved fold) and quarter-moon (sharp fold from an all-soft structure).
The results are fast: an insect-like robot created by Purnendu beats its wings at up to ~25Hz “quicker than most real butterflies and on-par with some speedier moths”, said the university.
Purnendu (Purnendu is the researcher’s entire name) was inspired by HASEL (hydraulically amplified self-healing electrostatic) actuators, developed by Christoph Keplinger at CU Boulder and now a commercial product from Artimus Robotics.
Electriflow was presented at DIS 2021, the the Association for Computing Machinery’s Designing Interactive Systems conference.
It is described in detail in ‘Electriflow: Soft electrohydraulic building blocks for prototyping shape-changing interfaces‘, an open-access paper published in the ACM (Association for Computing Machinery) digital library.
The actuators can be seen in action in this YouTube video
That 10kV power supply
The 10kV power supply used, which is a Peta-pico Voltron, deserves a special mention. It is built from on open-source power supply design created at Ecole polytechnique fédérale de Lausanne by Samuel Schlatter and Samuel Rosset specifically for soft actuator research after they could not find a suitable supply for their research project.
Information about the Peta-pico Voltron can be found here – its unusual high voltage modulation switches are OC100G opto-isolators which have 10kV photo-diodes as output devices.
"soft" - Google News
July 22, 2021 at 09:34PM
https://ift.tt/3rqHFi1
Electro-hydraulic actuator animates soft mini-robots - Electronics Weekly
"soft" - Google News
https://ift.tt/2QZtiPM
https://ift.tt/2KTtFc8
Bagikan Berita Ini














0 Response to "Electro-hydraulic actuator animates soft mini-robots - Electronics Weekly"
Post a Comment