September 25, 2020 feature
 A magnetic soft elastomer, composed of magnetic CrO2 particles embedded in PDMS, is locally heated above the Curie temperature of the particles via a laser. Above the Curie temperature, the particles lose their permanent magnetization, and their magnetization direction is reoriented by applying an external magnetic field during cooling. R.T., room temperature. (B) The magnetic soft elastomer is heated above the Curie temperature of the CrO2 particles (118°C) in 1.7 s and cooled down to half of this temperature in 4 s. (C) The magnetic soft elastomer is magnetized with 90% efficiency by heat-assisted magnetization and demagnetized by only heating above the Curie temperature without any external magnetic field. Error bars represent the SD of the mean. (D to G) Examples of the magnetic soft elastomer cut into the shapes of a body with a tail and wings (D) and a six-legged body (E) with corresponding magnetization directions (indicated by red arrows) and out-of-plane magnetic flux profile measurements. Color bars indicate magnetic flux density strength. (F and G) Upon magnetic actuation, individual parts underwent shape change in accordance with their programmed magnetization directions. Scale bars, 2 mm. Insets show the initial shape of the structures in the absence of magnetic fields. (H and I) Bodies with wings and legs are stacked to generate a 3D hierarchical dragonfly structure upon magnetic actuation. Scale bar, 2 mm. Actuation of the structures is performed by applying magnetic fields of 60 mT in the directions indicated with the black arrows. Credit: Science Advances, doi: 10.1126/sciadv.abc6414")
Shape-morphing magnetic soft machines have diverse applications in minimally invasive medicine, wearable devices and soft robotics. However, most magnetic programming approaches are inherently coupled to the fabrication processes, therefore they prevent reprogrammability of the machines. In a new report in Science Advances, Yunus Alapan and a multidisciplinary research team in Germany, Turkey, Switzerland and the U.S. described a high-throughput, magnetic programming strategy. To accomplish this, they heated magnetic soft materials containing embedded ferromagnetic particles above the Curie temperature of the embedded particles and reoriented their magnetic domains by applying external magnetic fields during cooling. The team demonstrated discrete, three-dimensional (3-D) and reprogrammable magnetization with high spatial resolution. Then, using the reprogrammable capacity, they configured the mechanical behavior of three objects—an auxetic metamaterial structure, tunable locomotion of a surface-walking robot and adaptive grasping of a soft gripper. The approach facilitated high-throughput magnetic programming to establish a rich design space and mass manufacturing potential to develop multiscale, reprogrammable soft robots.
Shape-morphing materials and developing magnetic soft machines
External stimuli including light, temperature, humidity, pH and acoustic or electromagnetic fields can control shape-morphing materials to form miniature microrobots for important futuristic applications across multidisciplinary research fields. Magnetically soft materials contain programmable shape deformation for fast, reversible and complex morphing. Applied magnetic fields can generate torque on magnetic soft materials to align the magnetization direction of all domains with the direction of the field. As a result, researchers can create spatial distribution of magnetization in a magnetic soft machine to develop programmable shape deformation under magnetic fields. In this work, Alapan et al. introduced a versatile strategy to encode programmable shape-morphing instructions into magnetic soft machines using chromium dioxide (CrO2) nanoparticles embedded in polydimethylsiloxane (PDMS) elastomer.
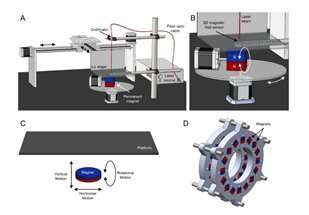
Chromium dioxide is a ferromagnetic material with a Curie temperature of 118 degrees Celsius that allowed heat-assisted magnetic reprogramming within the functional temperature range of most elastomers. The team prepared the CrO2/PDMS magnetic elastomer composite sheet to obtain a resulting magneto-elastic film and heated the material surface using a collimated near-infrared (NIR) laser with tunable power. The shortest heating-cooling cycle was 5.7 seconds under a 1.3 mm-diameter heated spot. The team could reverse the process and de-magnetize the material locally or fully by heating above the Curie temperature of CrO2 particles in the absence of a magnetic field for non-invasive magnetic programming and reprogramming effects.
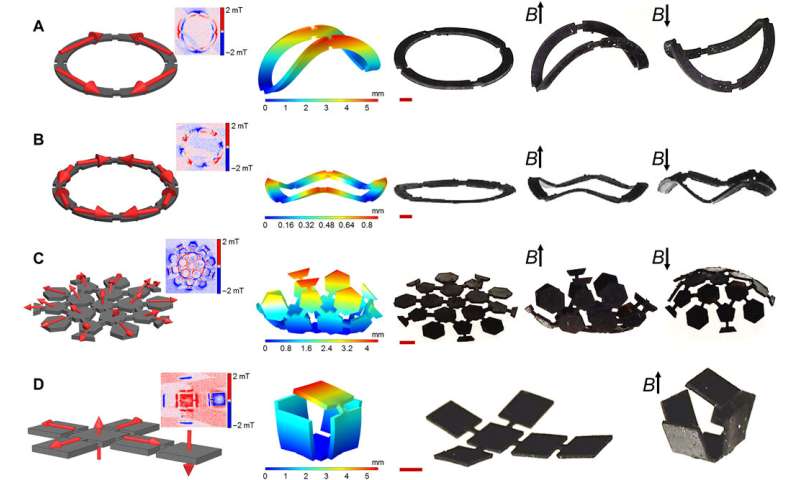
As an experimental model, Alapan et al. developed a planar magnetic soft elastomer film in the shape of a six-legged body with wings and a tail, and discretely magnetized the structure by varying 3-D directions to form a 3-D "dragonfly" under magnetic control. The 3-D magnetic profiles could transform into complex 3-D forms under magnetic fields. Using a computational model, the team therefore produced complex 3-D shape transformations with designated profiles of magnetization. They then magnetically reprogrammed soft machines to optimize their multifunctionality. For example, the scientists developed a heat-assisted magnetization strategy to program soft structures on demand, and in this instance, they presented a "stick man" figure with a 3-D magnetization encoded body, shoulders, arms and head to undergo complex transformation under magnetic actuation. Alapan et al. also reprogrammed the magnetization profile of the stick man structure to reconfigure its head and arms. They then locally reprogrammed the internal material behavior to facilitate the design and optimization of advanced active metamaterials. The reprogramming technique allowed them to control individual units and the accompanying mechanical behavior. The scientists highlighted the importance of simple programming to demonstrate flexible robots. The examples highlighted the accurate use of remote and non-invasive reprogramming to optimize material behavior during the development of soft robots.
Microscale robotic applications
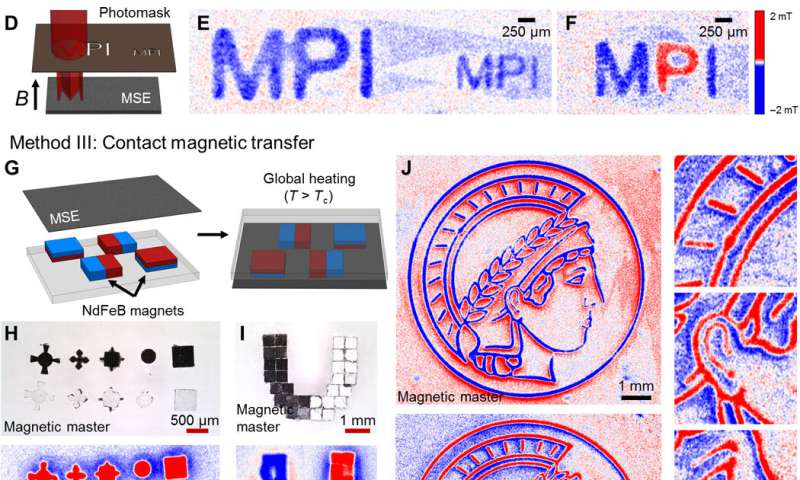
The foundation of microscale robots and machines developed in this work will have multiple applications that range from bioengineering to minimally invasive medicine. The magnetically programmed shape deformation can establish a new class of microsystems for advanced locomotion and control. Alapan et al. scaled down the heat-assisted magnetization approach to program microstructures by focusing the NIR laser beam size below 200 µm through a microscope objective. Using focused laser heating, they could magnetize a soft structure with six petals to generate synchronized petal deformation. Thereafter, they further programmed photomask-enabled micropatterned laser heating to generate specific letters of interest. The team additionally realized magnetic programming by generating the desired magnetic pattern near the soft elastomers and heating the system for one-shot magnetization of the entire sample.
In this way, Yunus Alapan and colleagues established heat-assisted programming to non-invasively program shape deformations at high spatial resolution. The team used discrete 3-D magnetization to develop a variety of magnetic soft machines from undulating swimmers and crawlers to multi-armed grippers. The scientists showed how the behavior of 3-D magnetic metamaterials with programmed domains underwent complex shape changes under external magnetic fields. Since laser-based heating is not feasible for magnetic soft machine reprogramming in the human body, Alapan et al. aim to incorporate the 3-D magnetization approach for high throughput programming applications in minimally invasive medical applications. The scientists can also achieve remote and selective heating via remote power transfer on to receiver coils stationed on elastomers that constitute the soft robot. The new soft machines with reprogrammable complex shape transformations will benefit diverse applications from medical robots to wearable health monitoring devices and bioinspired microrobots.
Yoonho Kim et al. Ferromagnetic soft continuum robots, Science Robotics (2019). DOI: 10.1126/scirobotics.aax7329
Xinge Yu et al. Skin-integrated wireless haptic interfaces for virtual and augmented reality, Nature (2019). DOI: 10.1038/s41586-019-1687-0
2020 Science X Network
Citation: Reprogrammable shape morphing of magnetic soft machines (2020, September 25) retrieved 25 September 2020 from https://ift.tt/2EC3erY
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only.
"soft" - Google News
September 25, 2020 at 11:00PM
https://ift.tt/2EC3erY
Reprogrammable shape morphing of magnetic soft machines - Tech Xplore
"soft" - Google News
https://ift.tt/2QZtiPM
https://ift.tt/2KTtFc8
Bagikan Berita Ini














0 Response to "Reprogrammable shape morphing of magnetic soft machines - Tech Xplore"
Post a Comment