CSU researchers used a twisted-and-coiled actuator to generate many ranges of motion, which could lead to breakthroughs in soft robotics. Credit: Jiefeng Sun
To Jianguo Zhao, the octopus is one of nature’s most elegant machines: nimble, shape-shifting and soft, squeezing through tight spaces with the quick contraction of a muscle.
The Colorado State University mechanical engineering researcher is turning admiration into action, leading a lab that probes the complexities and challenges of adaptive robotics. Now, he and his students have demonstrated a new way to enable complex motions in soft robots, inspired by biological marvels like octopi.
Many robotics researchers have turned to designing robots out of soft, compliant materials, for safety, resistance to damage, and better ability to exist in a human-driven world. But advancements in soft robots have been limited by their most important parts – what engineers call actuators, or the components that both move and control movement. In humans and animals, our actuators are our muscles, which respond to stimuli, and bend and contract in multiple directions.
In the journal Soft Robotics, Zhao’s team writes about a relatively new device, called a twisted-and-coiled actuator, that they used for the first time to generate programmable motion in a soft robot. By showing that this type of artificial muscle can perform such actuations as gripping, twisting and bending, they hope to next design miniature, soft robots with much richer ranges of motion and manipulation than ever previously shown. The experiments were led by graduate student Jiefeng Sun, the paper’s first author.
“Others developed this type of artificial muscle, but no one had ever demonstrated it as an effective way to actuate a soft robot,” said Zhao, an assistant professor in the Department of Mechanical Engineering. “It’s also very small – just a few centimeters in length.”
Made from common thread
Their actuator is made out of common household sewing thread, and it can be rendered into many shapes that generate corresponding motion. Like a human muscle, it can also “feel” a force and respond to it, like a hanging weight.
The researchers fabricated their twisted-and-coiled actuator by continuously twisting thread fibers, then coiling it into a spring-like shape using a mandrel. They developed a fabrication technique with uniform gaps between neighboring coils, giving the muscle the ability to contract without being preloaded. Such “free-stroking” actuators can then be embedded into a soft robot, achieving large magnitudes of motion.
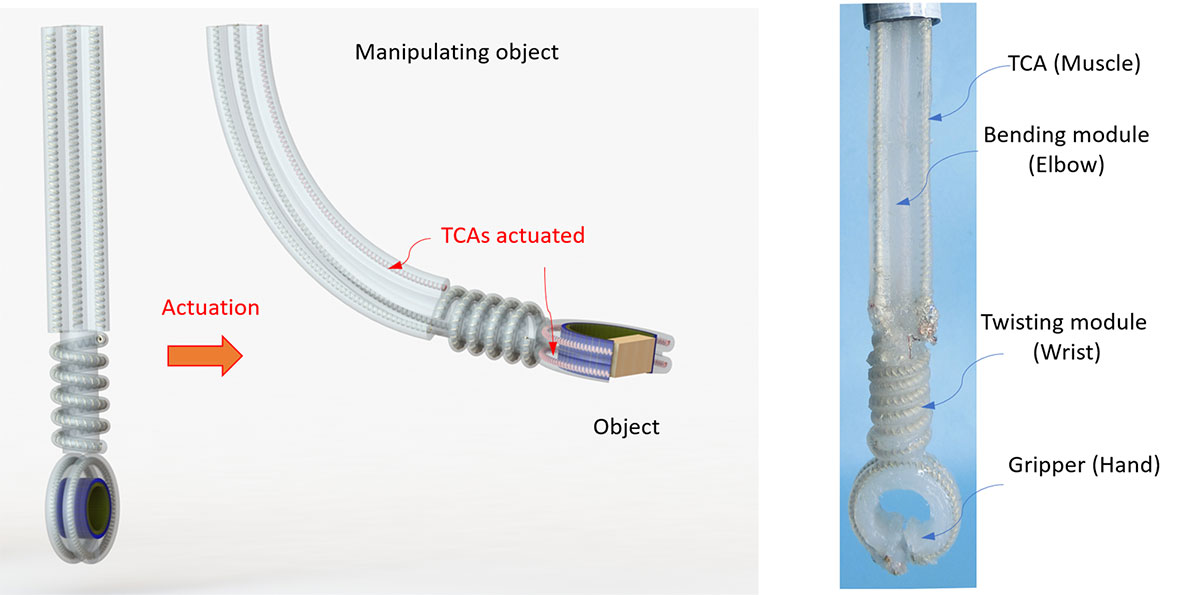
In their paper, the researchers embedded twisted-and-coiled actuators into a U shape, a helical shape, and straight shapes to enable three different motions: two-dimensional bending, twisting, and three-dimensional bending. They also combined the three motions to demonstrate a completely soft robotic arm that mimics a human forearm.
These basic breakthroughs in achieving new ranges of motions in soft robots could pave the way for more and more complex robots. Zhao envisions a world in which small, untethered, soft robots could be used for search-and-rescue applications, or surveillance. Or if they’re very small – like the ones Sun has demonstrated – they could potentially be used in the human body to deliver drugs or other therapies.
"soft" - Google News
July 11, 2020 at 12:51AM
https://ift.tt/32489v5
Soft robots can flex artificial muscles made from sewing thread - Source
"soft" - Google News
https://ift.tt/2QZtiPM
https://ift.tt/2KTtFc8
Bagikan Berita Ini














0 Response to "Soft robots can flex artificial muscles made from sewing thread - Source"
Post a Comment